检测点
utf8
STM32驱动WS2812
零基础python教程
批处理脚本
html
节点度
二维数组
prometheus
Firefoo
Linux基础指令
aws
程序
批量下载图片的插件
C
软考高级系统架构设计师系列
盒子ROM
symfony
koa
ACK
自动控制原理
2024/4/11 18:14:08
自动控制原理笔记-频率响应法-系统的开环频率特性图的绘制
目录 一、系统的开环对数频率特性图(Bode图)
绘制方法I:(各环节的Bode图求和)
绘制方法II:(不求和,直接绘图)
二、系统的开环幅相特性图(Nyquist图、极坐标…
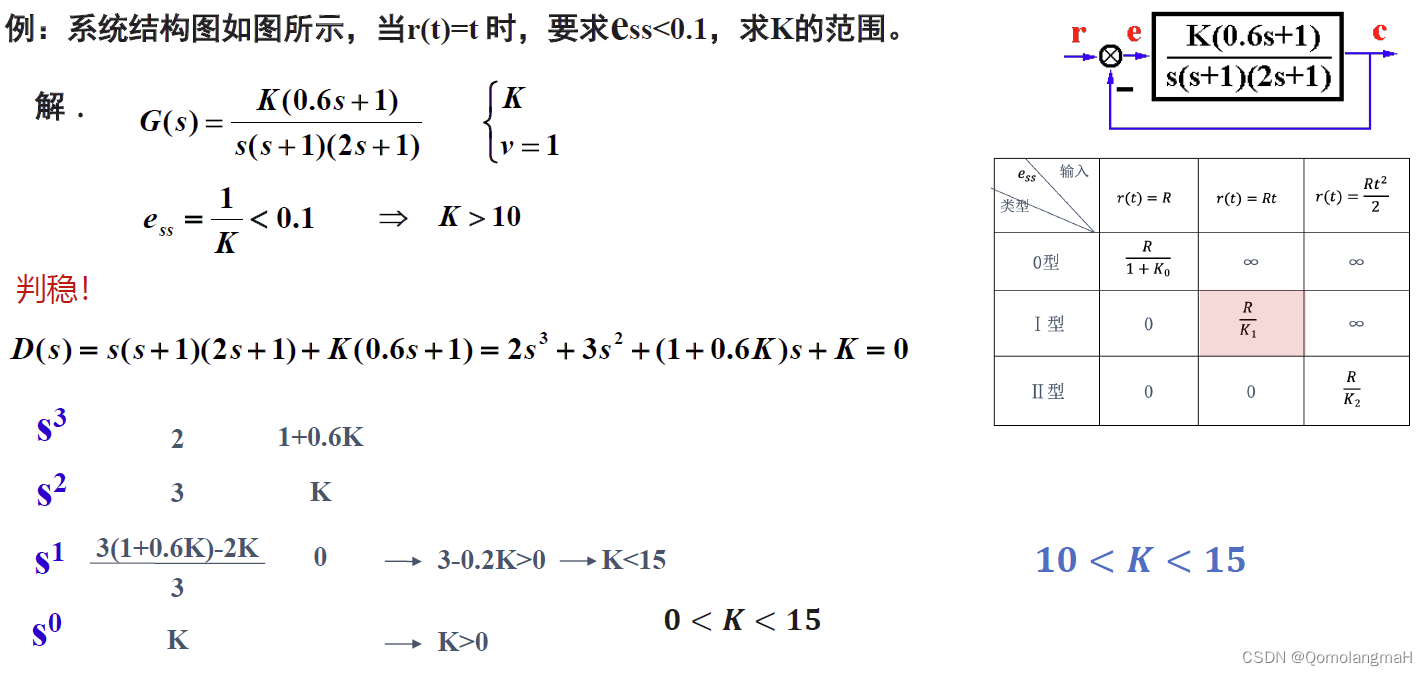
【自动控制原理】时域分析法:稳定性分析(稳)、误差分析和计算(准)
文章目录 第3章 时域分析法3.1 基本概念3.2~4 一阶、二阶、高阶系统的时间响应及动态性能3.6 稳定性分析——稳3.6.1. 稳定性的定义3.6.2 稳定性的条件3.6.3 劳斯稳定判据首列出现0,但该行不全为0首列出现0,且该行全为0 3.5 误差分析和计算——准3.5.1稳…

Chapter2:时域分析法(下)
第二章:时域分析法 Exercise2.15
设单位反馈系统的开环传递函数为: G ( s ) = 4 s ( s + 2 ) G(s)=\displaystyle\frac{4}{s(s+2)} G(

Chapter6:线性离散系统的分析与校正(上)
第六章:线性离散系统的分析与校正 Exercise6.1
根据定义: E ∗ ( s ) = ∑ n = 0 ∞ e ( n T ) e − n T

Chapter7.4:线性离散系统的分析与校正考研参考题
此系列属于胡寿松《自动控制原理题海与考研指导》(第三版)习题精选,仅包含部分经典习题,需要完整版习题答案请自行查找,本系列属于知识点巩固部分,搭配如下几个系列进行学习,可用于期末考试和考研复习。 自动控制原理(…

Chapter8.3:非线性控制系统分析
此系列属于胡寿松《自动控制原理题海与考研指导》(第三版)习题精选,仅包含部分经典习题,需要完整版习题答案请自行查找,本系列属于知识点巩固部分,搭配如下几个系列进行学习,可用于期末考试和考研复习。 自动控制原理(…

Chapter8:线性系统的状态空间分析与综合(上)
第八章:线性系统的状态空间分析与综合 Exercise8.1
已知控制系统结构图如下所示: 其中: u u u为输入, y y y
Chapter1:控制系统数学模型(上)
第一章:控制系统数学模型 Exercise1.1
求下图所示函数 f ( t ) f(t) f(t)的拉普拉斯变换式 F ( s ) F(s)
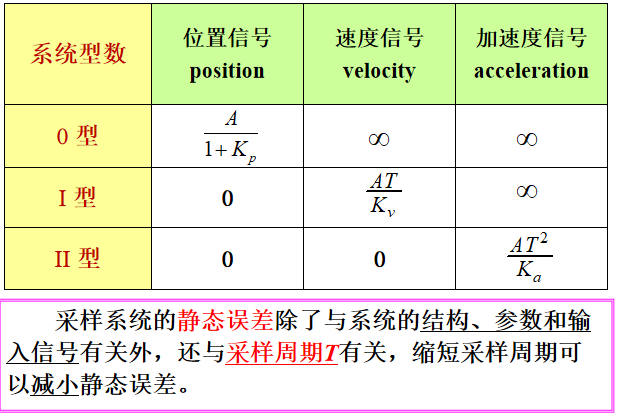
自动控制原理笔记-采样控制系统
目录 采样控制系统的基本概念:
采样过程及采样定理:
一、采样过程
二、采样定理(香农采样定理、奈奎斯特采样定律)
三、信号复现
四、零阶保持器
z变换与z反变换:
z变换的定义
z变换基本定理
z反变换
采样系…
自动控制原理模拟卷3
自动控制原理模拟题三 Question1
已知控制系统结构图如下图所示,求控制系统的传递函数 C ( s ) / R ( s ) C(s)/R(s) C(s)/R(s)</

自动控制原理笔记-频率响应法-频率特性的概念
目录 频率响应法:
频率特性的概念:
一、频率特性的定义:
二、频率特性的求法:
三、频率特性的物理意义:
四、频率特性的图形表示方法: 频率响应法:
基本思想:通过开环频率特性的图形对系统进行分析。
主要优点&…